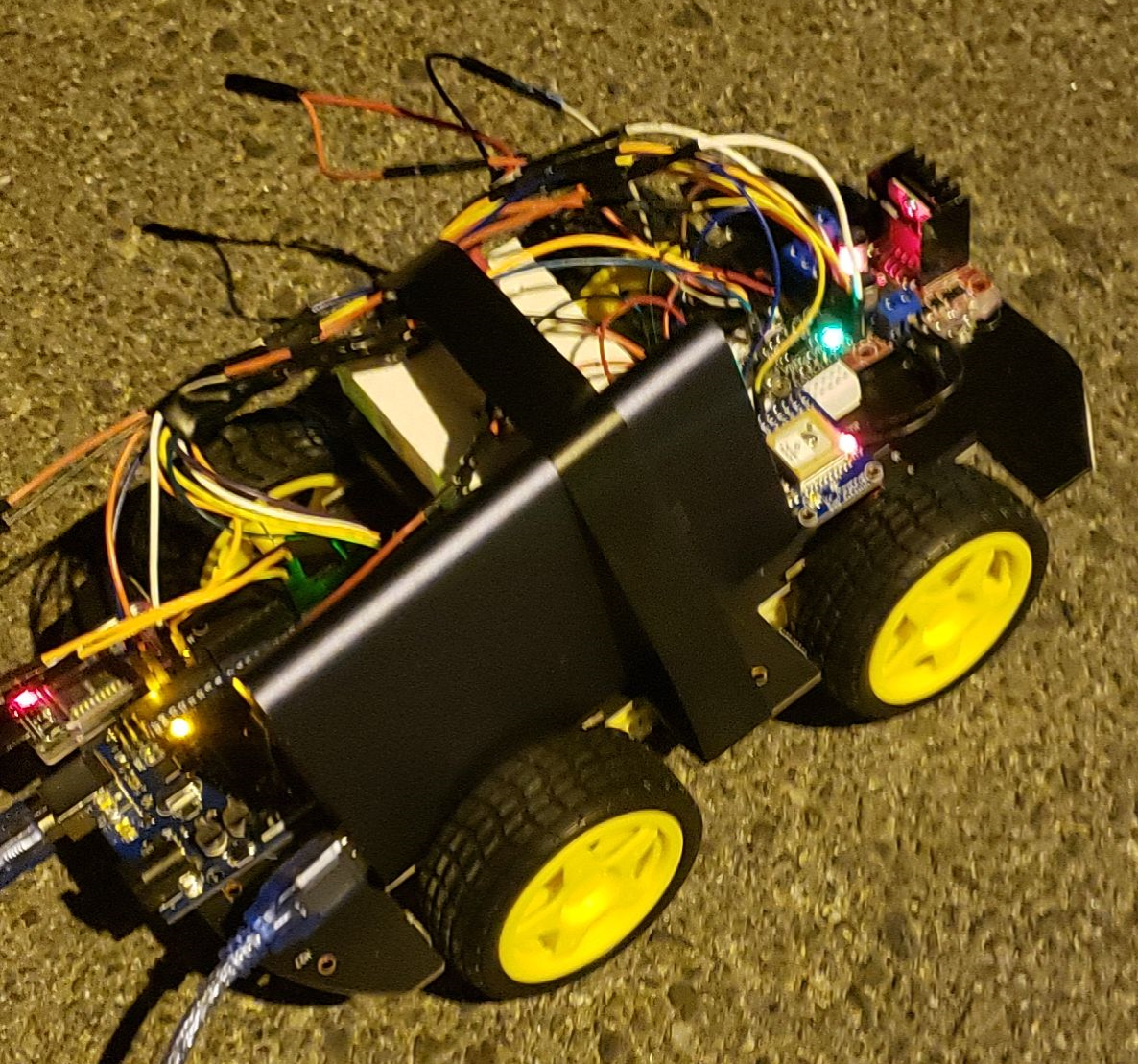
The GPS tracking robot car was implemented as a final project for a microcontroller course. The purpose of the project was to design and develop a robot car capable of autonomously tracking and following a cellphone while maintaining a specified following distance. The GPS tracking robot car aimed to showcase the integration of software and hardware technologies to build assistance robots. The concept of building assistance robots using similar technology and software can have numerous applications in various fields, including surveillance, search and rescue operations, as well as logistics and warehousing. The integration of software and hardware technologies allows for adaptive and intelligent behavior, making assistance robots valuable in scenarios where human presence may be limited or risky.
By utilizing GPS tracking, the robot car can accurately determine the location of the cellphone, allowing it to follow the device with precision. The compass module helps the robot car maintain the correct orientation while tracking the cellphone's movement. Bluetooth communication enables seamless data transfer between the cellphone and the robot car, allowing for real-time updates on the cellphone's position.
The GPS tracking robot car project was successfully developed through the collaborative efforts of a team comprising three electrical and computer engineers. Through many hours of dedicated work, research, and development, the team was able to successfully integrate advanced GPS technology into the vehicle allowing for accurate location detection and navigation.
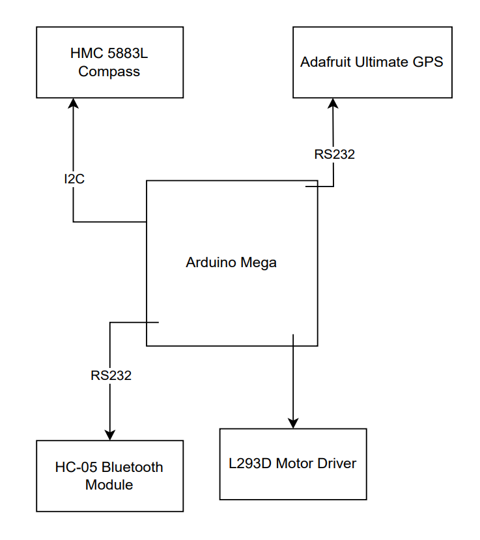
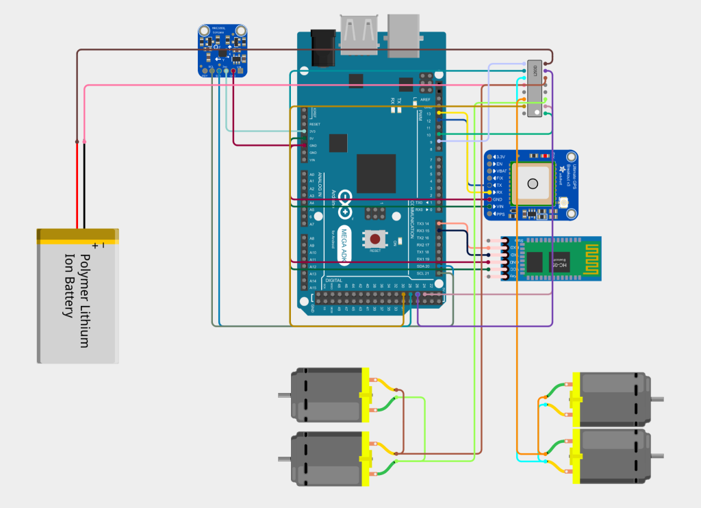
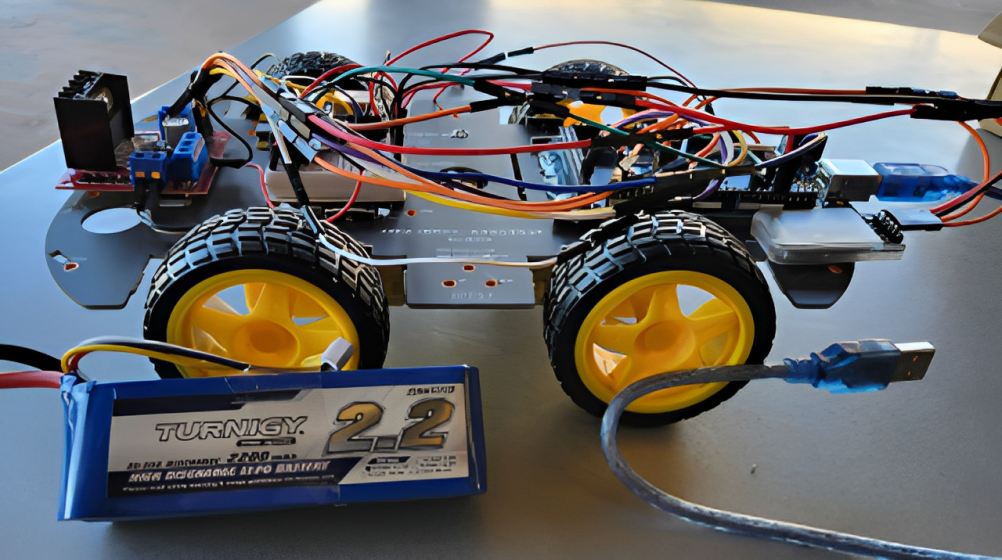
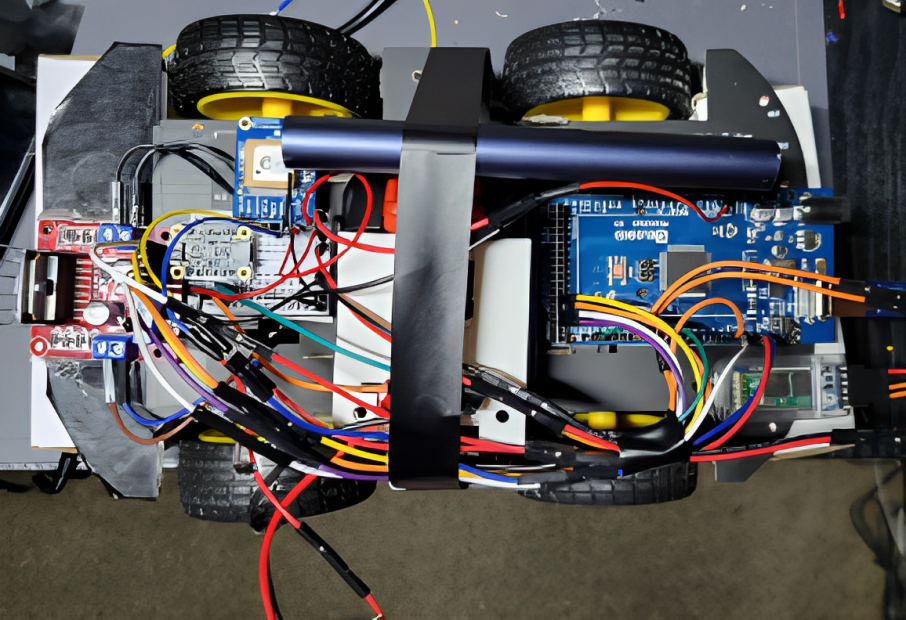
The GPS tracking robot car comprises five main components, each playing a critical role in its functionality and performance:
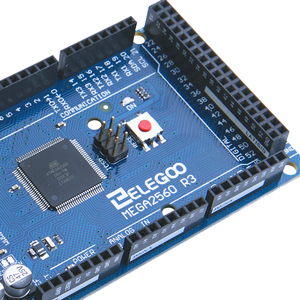
Arduino Mega: The Arduino Mega microcontroller board serves as the brain of the robot car, providing computational power and control for the various components. It processes sensor readings and Bluetooth transmitted coordinates from a cellphone to control the vehicles orientation and movement.
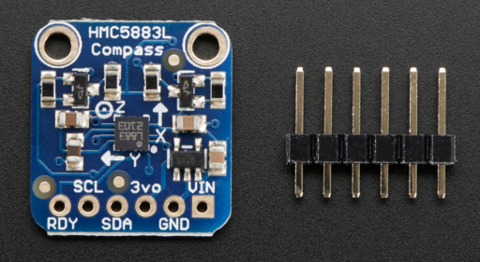
HMC5883L Compass: The HMC5883L Compass module is a compact and highly sensitive magnetometer that provides accurate heading information. It enables the robot car to determine its orientation with respect to the Earth's magnetic field, aiding in navigation and direction control.
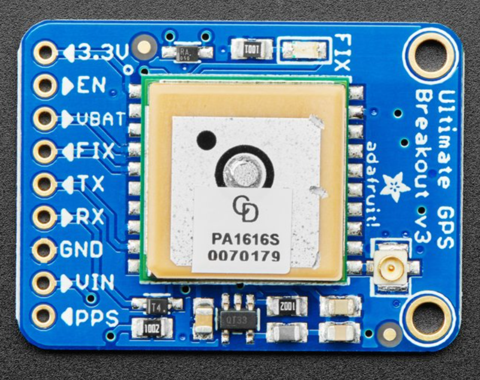
Adafruit Ultimate GPS: The Adafruit Ultimate GPS module is a high-performance GPS receiver that provides precise global positioning information. It utilizes multiple satellite systems to obtain accurate latitude, longitude, altitude, and time data. This module enables the robot car to track its position and navigate to specific coordinates.
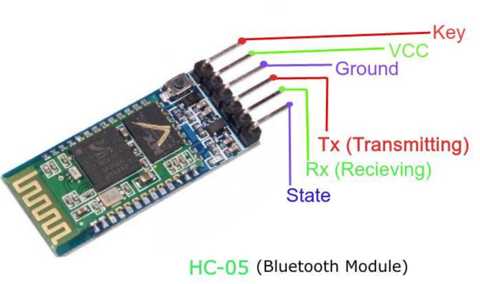
HC-05 Bluetooth Module: The HC-05 Bluetooth module facilitates wireless communication and enables the robot car to establish a connection with external devices, such as smartphones or computers. It allows for remote control and data exchange, enhancing the car's functionality and potential applications.
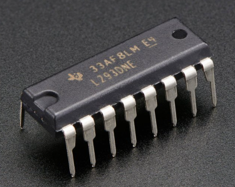
L293D Motor Driver: The L293D Motor Driver is a specialized integrated circuit that acts as a bridge between the Arduino and the motors of the robot car. It provides the necessary voltage and current control to drive and control the direction of the motors, enabling precise movement and maneuverability.
The link below can be used to view the code on Github.
View Code